HOME > プレスリリース > 2015 > 宇宙用ロボットアームにおける無反動制御の実用化とその性能評価について
宇宙用ロボットアームにおける無反動制御の実用化とその性能評価について
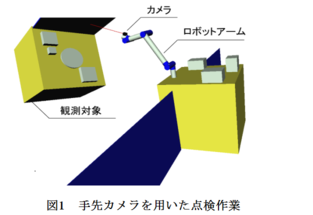
― 軌道上の人工衛星に搭載したロボットアームによる点検作業をシミュレート ―
東京都市大学工学部(東京都世田谷区)機械システム工学科の金宮好和教授ら研究チームは、宇宙用ロボットアームの無反動制御[1]が軌道上での保守点検作業に適用可能であることを動力学シミュレーションによって検証し、宇宙開発における従来方法と比較して、作業効率とエネルギー効率の面で非常に優れた性能を発揮することを明らかにしました。
本研究成果は、6月に開催されるロボティクス・メカトロニクス講演会2016 in Yokohama(日本機械学会ロボティクス・メカトロニクス部門主催)にて発表の予定です。
本研究のポイント
●本研究では、技術試験衛星VII型(ETS-VII)[2]による軌道上実験において検証してきた宇宙用ロボットアームにおける無反動制御の研究成果を、軌道上における実際の作業に適用した。
●宇宙環境において重要な指標である作業効率とエネルギー効率について従来手法と無反動制御を評価し、無反動制御が高効率な作業動作を実現する優れた性能を持つことを示した。
●無反動制御により生成されるロボットアームの運動が、衛星の姿勢を拘束した状態における運動エネルギー[3]の最小の運動と高い精度で一致することを数値計算により示した。
概要
本研究では、人工衛星にロボットアームが搭載された浮遊ベースロボット(図1右側)の新しい制御法の開発とその性能評価について検討しました。この浮遊ベースロボットは、アームの動作により衛星本体に回転運動が生じることが特徴であり、またこれが制御[4]を困難なものとしています。我々は過去に衛星本体に回転運動を生じさせないロボットアームの制御方法である無反動制御を提案し、その有用性について検討してきました。
本研究は、1997年よりJAXA[5]により実施された技術試験衛星VII型(ETS-VII)による軌道上実験を参考に、無反動制御の利用に適した実作業の提案とその性能評価を行ったものです。浮遊ベースロボットが頻繁に行う作業として、ロボットアーム手先に搭載されたカメラを用いた目視点検作業に着目し、無反動制御により実現する方法について検討しました。
性能評価では、従来のロボットアームの制御方法と提案手法を同条件下において比較し、衛星本体に生じる姿勢変化量と運動エネルギーを指標として評価を行いました。姿勢変化量は間接的にロボットアームの動作反動を表しており、この変化量が大きいほど衛星本体に搭載された姿勢制御装置(リアクションホイール[6]など)による姿勢回復が困難になり、作業時間の増加につながります。無反動制御を実作業で用いることで、姿勢変化を生じさせることなく同様の作業を遂行できることから、作業効率の改善が期待できることを数値シミュレーションにより示しました。
また、宇宙環境における重要な指標の一つであるエネルギー効率についても、リアクションホイールを用いた姿勢維持手法よりも、少ないエネルギーで同様の作業を実行可能であることを示しました。具体的には、先に述べた手先カメラを用いた点検作業(図1)を複数の条件下で実行した際、平均で1000分の1程度にエネルギー消費量を削減できることを数値シミュレーションにより確認しました。これは、リアクションホイールの駆動に必要なエネルギーが過大であり、リアクションホイールを用いない無反動制御が実質的に運動エネルギー最小であることに起因します。このように無反動制御を実作業に用いることで、現在利用されているリアクションホイールでは困難な高効率な作業動作の実現、大幅なエネルギーの削減が期待できます。
研究の背景
軌道上ロボット[7]は、今後、宇宙環境における大型構造物の建造、人工衛星の保守・点検、宇宙デブリ[8]の回収などのミッションに積極的に利用することが期待されています。軌道上ロボットの中でも、図1に示すような人工衛星にロボットアームが搭載された浮遊ベースロボットは、その高い可動性から世界中の研究機関で開発が行われています。1997年には世界初となる浮遊ベースロボットの実験機として、JAXAがETS-VIIを打ち上げ、宇宙ロボットの基礎技術を実証しました。また2007年にはアメリカのDARPA[9]により同様の実験が行われました。
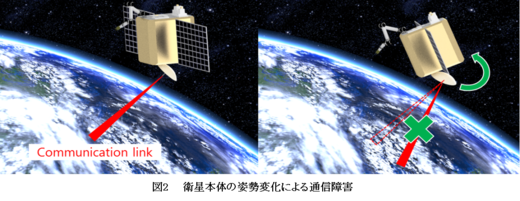
浮遊ベースロボットを実用化する際に問題となるのが、これまでロボットアームが利用されてきた地上と浮遊ベースロボットが活動する宇宙とで動作環境が大きく異なることです。特に問題とされるのが、ロボットアームの動作により衛星本体に回転運動が生じることであり、図2に示すような衛星本体の回転運動自体がロボットシステムと地上基地間の通信障害の原因となるため、従来地上で用いられてきたロボットアームの制御方法を直接利用することは困難です。従来ではリアクションホイールなどの衛星本体に搭載された姿勢制御装置を用いることで、ロボットアームの動作により生じる反動を補償し回転運動を抑制してきましたが、リアクションホイールは構造上大きな出力を得ることが難しく、ロボットアームを低速で動作させることが要求されます。よって、作業効率や緊急時の高速な回避動作などは諦めるしかありませんでした。
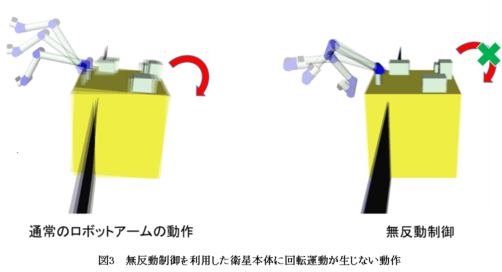
しかし、図3に示す無反動制御と呼ばれる衛星本体に回転運動を起因しないロボットアームの制御方法を提案したことにより、理論的にはロボットアームの性能の範囲内で高速に動作することが可能となり、先に述べたETS-VIIにおける軌道上実験において、リアクションホイールを必要としない無反動制御による高速な動作の実現が実証されました。ただ、無反動制御の利用においては、ロボットアームの運動可能領域を制限しなければならないため、実作業での利用には事前準備が必要であり、さらにその手法は十分に確立されていませんでした。そこで本研究では、無反動制御の利用に適した作業を検討し、その性能を評価する手法の確立を目的としました。
期待される成果と応用
先に述べたように、今後の宇宙開発においては宇宙ロボットの積極的な利用が期待されており、これまで宇宙飛行士が船外活動により行ってきた作業を宇宙ロボットが代替することで、安全性に加えてコスト削減による経済的効果も期待できます。我々の研究の立ち位置は、この宇宙ロボットにおいて必要不可欠な技術であるロボットアームの制御であり、またこれを利用した実作業はさまざまなミッションにおいて利用可能です。本研究の成果により得られる作業時間の短縮やエネルギー消費量の削減が、今後の宇宙開発における宇宙ロボットの利用推進に大きく貢献することを期待しています。
また、無反動制御の基になる反動制御の方法は、宇宙ロボットに限らず地上で作業するロボットにも適用可能です。一例として人型ロボットのバランス制御や、ホイールベースとロボットアームにより構成される家庭用ロボットシステムの機械的構造から生じる振動の抑制に適用可能であると考えます。
発表者
・金宮好和(東京都市大学工学部機械システム工学科 教授)
・佐藤大祐(東京都市大学工学部機械システム工学科 准教授)
・曽根大樹(東京都市大学大学院工学研究科 院生)
用語解説
[1] 無反動制御:衛星本体に回転運動を生じさせないロボットアームの制御方法
[2] 技術試験衛星VII型(ETS-VII):1997年に打ち上げられた世界初の浮遊ベースロボット。三軸制御の人工衛星[10]と六つの関節を持つ2 メートル長のロボットアームにより構成される。
[3] 運動エネルギー:物体の運動に関係するエネルギー
[4] 制御:機械などに目標の動作を実行させること。
[5] JAXA:日本の航空宇宙開発政策を担う研究開発機関
[6] リアクションホイール:人工衛星の姿勢を制御する装置。通常は円盤とこれを回転させるモータにより構成される。ロボットアームの動作反動に比べて出力が小さい。
[7] 軌道上ロボット:軌道上で活動するロボットの総称。現在運用されている代表的なロボットは、国際宇宙ステーションに搭載された日本のJEMRMSやカナダアーム2など。
[8] 宇宙デブリ:宇宙機の破片、切り離されたロケットの部品や運用の終了した人工衛星などの軌道上を周回するごみ。約10 cm以上のサイズのすべてのデブリは、人工衛星などの宇宙機との衝突による被害が大きいことから、常に地上から監視されている。
[9] DARPA:アメリカ国防総省の軍事利用のための新技術開発および研究を行う機関。近年、ロボットの開発にも力を入れている。
[10] 三軸制御の人工衛星:立方体の形状の人工衛星の三つの直交する軸にリアクションホイールが搭載された人工衛星。
【関連するリンク先】
~報道関係者からのお問い合わせ先~
・東京都市大学工学部機械システム工学科
教授 金宮好和(かなみや よしかず)
・東京都市大学事務局企画室
外 智晃(そと ともあき)
Tel:03-5707-0104(代)
![]()